 |
| http://weelookang.blogspot.sg/2014/10/components-vector-model.html
https://dl.dropboxusercontent.com/u/44365627/lookangEJSworkspace/export/ejss_model_horizontalvertical/horizontalvertical_Simulation.xhtml author: lookang, Fu-Kwun, Andreu Glasmann, Wolfgang Christian, and Mario Belloni author of EJS 5: Paco. |
Engage:
Vectors are fundamental in the physical sciences. They can be used to represent any quantity that has magnitude, has direction, and which adheres to the rules of vector addition. An example is velocity, the magnitude of which is speed. For example, the velocity 4 meters per second upward could be represented by the vectorComponent:
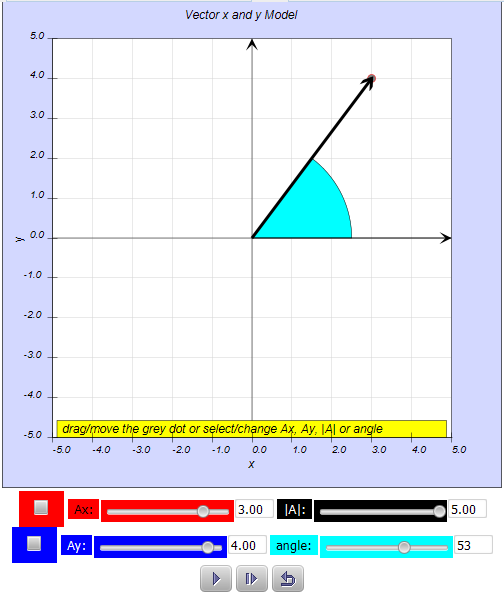
As explained above a vector is often described by a set of vector components that add up to form the given vector. Typically, these components are the projections of the vector on a set of mutually perpendicular reference axes (basis vectors). The vector is said to be decomposed or resolved with respect to that set. For simplicity, let's assume x and y direction as the reference axes, referring to the model above.the equations for the components are:
Model:
This model uses the following equations:Length or Magnitude |A|:
The length or magnitude or norm of the vector a is denoted by |A|.Angle:
The angle in radian of the vector that makes with the positive x axis isthe conversion the degree in
or
in the design of the slider values which shows in degree, the equation that converts back from degree to radian is used
Attribution:
when i made this model from a fresh ejss, the following works were reference from- lookang, Fu-Kwun http://weelookang.blogspot.sg/2010/06/ejs-open-source-represent-vector.html
- andreu glasmann, wolfgang christian, mario belloni Physlet Physics illustration 3.1. found in the Davidson College Digital Library for Physlets View the Physlet Two-Dimensional Kinematics Illustrations Package
Changes made:
- remade everything from lookang, Fu-Kwun http://weelookang.blogspot.sg/2010/06/ejs-open-source-represent-vector.html
- re-used some elements from andreu glasmann, wolfgang christian, mario belloni Physlet Physics illustration 3.1. found in the Davidson College Digital Library for Physlets View the Physlet Two-Dimensional Kinematics Illustrations Package to speed up development as per legally allowed by creative commons attribution, sharelike. i esepcially liked the ability to interact with the vector now, thanks to Prof Paco author of EJS 5.
- added ability to animate, thanks to idea from https://www.desmos.com/ and http://www.geogebra.org/
- added angle thanks to Prof Fu-Kwun guidance on some other works some years back!